| ■ 自動制御の話【3】 自動制御のシミュレーション
|
|

1.はじめに
制御とは,「ある目的に適合するように,対象となっている物に所用の操作を加えること」ということですが,その目的を達成するために物理的な操作が必要です.
例を上げると,室温の温度制御の場合,制御された結果(制御量)を目的の温度に適合させるためエアコンあるいはストーブの火力の強弱などの操作(操作量)が必要です.その為には,室温の計測(検出)や目的の温度(目標値)との比較判断および修正動作をさせるための手段(制御アルゴリズム)が重要になってきます.
電気コタツや熱帯魚の水槽などの簡単な温度制御の場合は,サーモスタットとヒータで行なうことができますが,精油,鉄鋼,化学,繊維,製紙などの工業プラントでは温度制御を正確に行なわなければ製品の品質に影響を及ぼします.
生産過程の自動化により生産費を下げ,品質のよい製品を大量に生産することができます.さらに実際に作業を行なう人間を単調な作業,悪環境や危険な作業から解放することができます.
前回述べたように、コンピュータの発達にともないすべての分野で自動化が行なわれており,自動化のための制御装置もディジタル化が進んでおります.
2. シミュレーション.
2.1 制御対象の数式化
実際に制御を行なう場合,制御しようとする対象(制御対象)の特性をよく調べなければ良い制御ができません.しかしそのためにわざわざ実験装置を作っていたのでは費用や時間もかかります.また動植物や自然,宇宙を対象にした場合は不可能です.
そこで,シミュレーションという方法により制御対象の数式モデルを作り,その特性について検討するという手段を取ります.
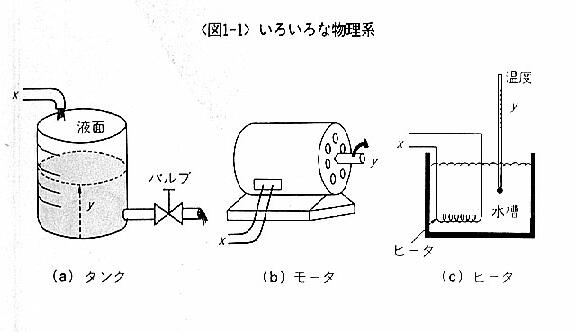
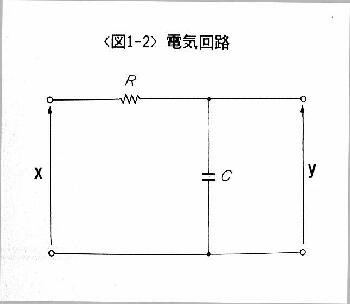
図1-1の物理系は,図1-2の抵抗とコンデンサからなる電気回路と等価であり,近似的にすべて同じ数式(1)式で表わすことができますので,大規模モデルであってもシミュレーションであれば簡単に行なうことができます.また失敗しても,実験のように装置の費用が無駄になることはなく,プログラムを修正することによりいくらでもやり直すことができます.
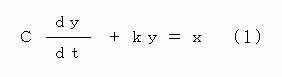
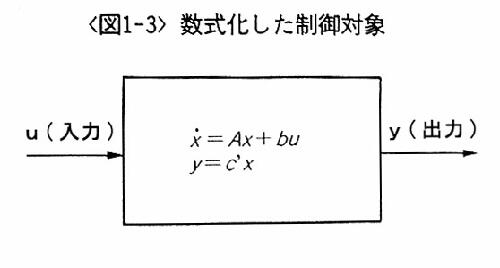
(1)式は(2)式の状態方程式で表されます.
|
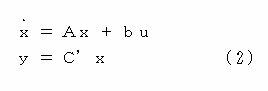 |
したがって制御対象は,図1-3のようになります.しかしこれは連続モデルの場合ですからディジタル制御を行なう場合は離散モデルへ変換しなくてはなりません.
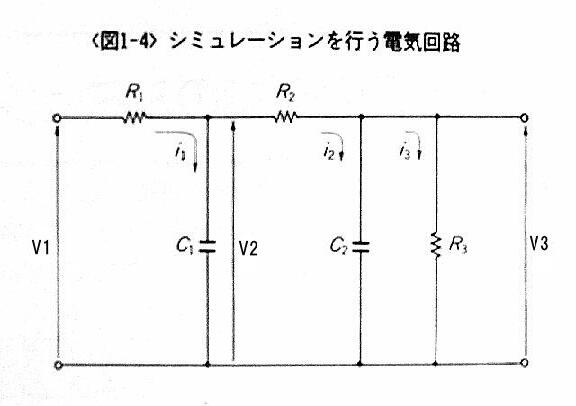
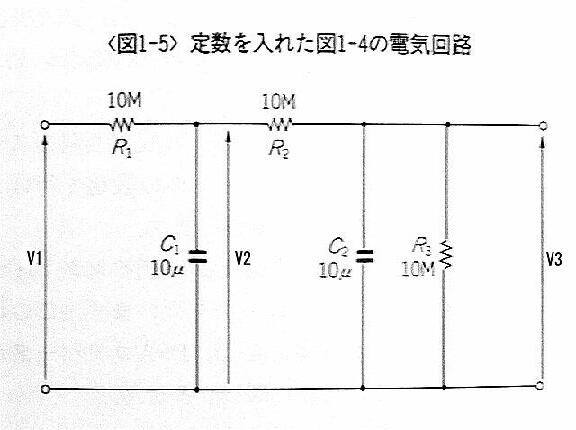
ここでは,制御対象を抵抗とコンデンサによる2次系のシミュレーションに限らせていただきます.今回は制御対象として図1-4のような抵抗とコンデンサによる電気回路を考えます.シミュレーションを行なうため,実際に抵抗RとコンデンサCに数値を代入(図1-5参照)します.
分かりやすくする為に,C1=C2=10μF , R1=R2=R3=10MΩ としたときの状態方程式は次のようになります。
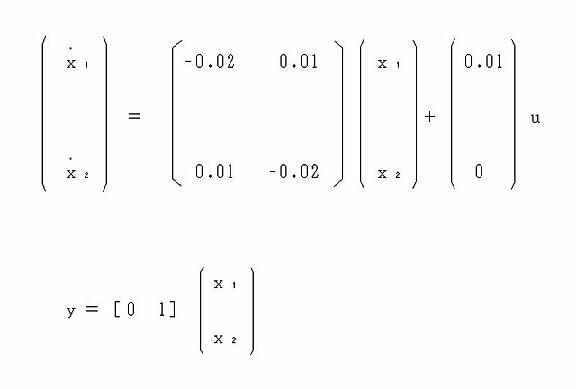
(3)式
ただし u =V1 , x1=V2 , x2=V3
(PID制御の場合は1入力1出力であるので,出力はV3のみでよい)
マトリクスの各成分が決まりましたので,(3)式をサンプリング周期10secで離散化しますと(4)式が求まります.
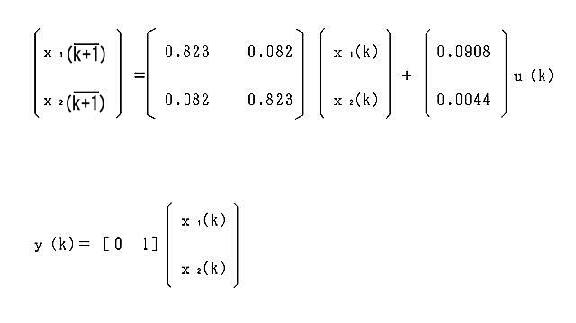
(4)式
ただし u =V1 , x1=V2 , x2=V3
つづく
文責
元・北海道大学工学研究科 文部科学技官 石川 栄一
自動制御に関するご質問は次のメールアドレス宛に送信して下さい。

|
|
|