| ■ 自動制御の話【4】 PID制御のシミュレーション
|
|

2.2 制御対象のステップ応答
前項にて制御対象を数式で表現することができましたが,PID制御を行なう場合は,最適なパラメータを設定しなければ,よい応答(出力)は期待できないどころか,制御対象や制御系全体の破損など危険な場合もあります.ここでは,最もポピュラーなパラメータ設定法であるジーグラー・ニコルスのステップ応答法でパラメータを設定します.表1-1及び図1-5参照
| P制御 |
Kp=τ/k・L |
Ti=∞ |
Td=0 |
| PI制御 |
Kp=0.9τ/K・L |
Ti=3.3L |
Td=0 |
| PID制御 |
Kp=1.2τ/K・L |
Ti=2L |
Td=0.5L |
表1-1 ジーグラ,ニコルスによる最適調整の係数(振幅減衰率1/4)
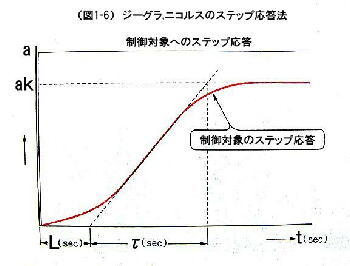 |
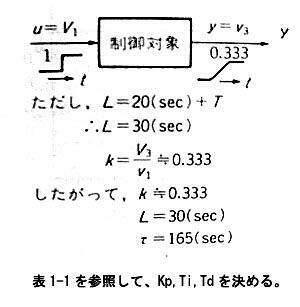
制御対象の応答,図1-6よ
り,
k=ak/a=0.333
L=20(sec)+T
=30(sec)
τ=165(sec)
が求まります.
ただし
T:サンプリング周期
=10(sec)
|
|
|
 |
このように,ジーグラー・ニコルスのPIDパラメータ設定法(ステップ応答法)では,制御対象(例では2次遅れ要素)を「むだ時間+1次遅れ」で近似します.
また,ディジタル制御の場合では,演算処理にかかる時間またはサンプリング周期を制御対象の「むだ時間」の一部とみなし処理します.
|
3. PID制御
3.1 P制御とシミュレーション
まずPID制御との比較のためにP制御のシミュレーションをしてみます.
P制御は比例制御ともよび,入力(偏差)と出力(操作量)との間に比例関係がなり立つ制御で入出力関係は次式で示されます.
u(t)=kp・e(t) (5)
ただし、【u(t):操作量,kp:比例ゲイン,e(t):偏差】
k,L,τが前章にて求まりましたので,ジーグラー・ニコルスの設定条件(表1-1参照)よりパラメータを設定します.したがって、Kp=τ/(k*L)=16.52 となりますが、かなりの偏差が残ってしまいます。P制御のシミュレーション結果を図1-7に示します.
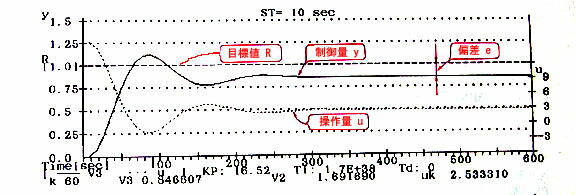
図1-7 P制御のシュミレーション結果
3.2 PI制御とシミュレーション
同様にPI制御のシミュレーションをしてみます.
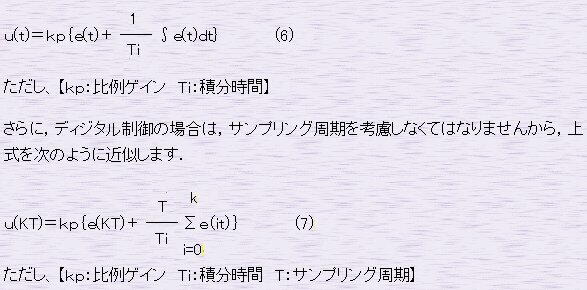
PI制御は比例積分制御ともよび,入出力関係は(6)式で示され,目標値の変更や定常的な外乱があっても偏差(誤差)を生じさせないという特長があります.
ジーグラ・ニコルスの設定条件(表1参照)よりPI制御のパラメータ,
kp=0.9τ/(k*L)=14.86 , Ti=3.3*L=99
が求まります.PI制御のシミュレーション結果を図1-8に示します.
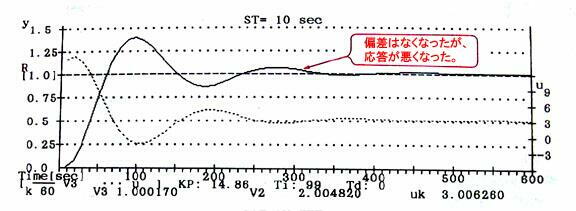
図1-8 P制御のシュミレーション結果
3.3 PID制御とシミュレーション
PID制御は比例積分微分制御ともよび積分動作における偏差をなくす性質と微分動作の振動を制動させる性質を取り入れてP動作と組み合わせたもので,偏差がなく即応性のよい応答を実現できます.
位置型PID制御器の入出力関係式は次式であらわせます.
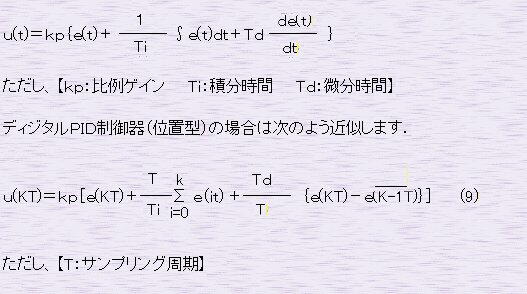
ジーグラー・ニコルスの設定条件(表1参照)より
kp=1.2τ/(k*L)=19.82 , Ti=2*L=60 , Td=0.5*L=15
が求まります.PID制御のシミュレーション結果を図1-9に示します.
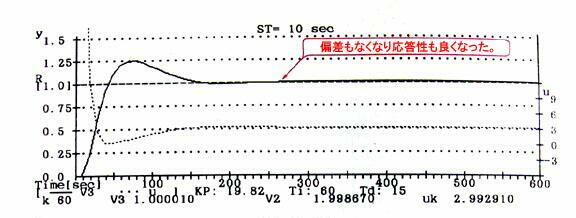
図1-9 PID制御のシミュレーション結果
4. あとがき
シミュレーションの結果を見ても,P制御,PI制御,PID制御の応答が異なることが解るとおもいます.特にP制御はかなりの偏差(誤差)が残りますし,PI制御ですと定常状態になる時間が長くかかります.またリミッタのかけかたによっても応答が変わります.
DDCを行なう場合は,D/A変換器からの出力は±1v〜±10v程度しか得ることができないので,その範囲でリミッタをかけなければD/A変換器がオーバーフローしてしまい出力が不正確になってしまいます.
今回は,ディジタルPID制御(位置型)のパラメータの設定方法とシミュレーションを中心に説明しましたが,実際の制御対象は,非線形の部分があるためシミュレーション通りにいかないのが現実です.
この場合,kp,Ti,Tdの各パラメータを微調整することにより,ほぼ目的にかなった応答を得ることができます.
文責
元・北海道大学工学研究科 文部科学技官 石川 栄一
自動制御に関するご質問は次のメールアドレス宛に送信して下さい。

|
|
|



